I'm an aerospace engineer and roboticist with an enthusiasm for unconventional mechatronics, who is interested in understanding the mechanics of animal locomotion for the benefit of synthetic locomotion, particularly flight. I received my Master’s degree in Aerospace Engineering from the University of Cambridge and my PhD in Aeronautics from Imperial College London, where my thesis on Aerial-Aquatic locomotion won the ‘Best UK PhD in Robotics Award’. Before moving to Surrey I worked at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany, where I studied the arboreal acrobatics of rainforest-dwelling reptiles. I have also been the engineering lead in an ESA-funded startup, where I helped develop a unique agricultural robot.
My research spans a range of mechanical, aeronautical and biological disciplines, but it will more often then not involve something that flies. I'm particularly interested in multimodal locomotion, and understanding movement at the limits of performance. Some highlight videos are below, and more can be found here
I'm currently guest editing a special issue of Nature Scientific Reports on Bioinspired Robot Locomotion, details can be found here
A bistable mechanism has two stable states with energy input required to move from one stable state to another. This energy barrier allows for energy storage and release which can be used to improve systems characteristics. Bistability has been used to increase the frequency range over which a kinetic energy harvester is effective, and it has been proposed that bistability can increase the efficiency of biomimetic swimming robots. However, experiments involving bistable swimming robots have typically used bistability as a means of overcoming limitations inherent to soft actuators, rather than to increase overall performance. This article implements bistability into a swimming robotic and compares performance with and without bistable action. The static thrust generation and power consumption for bistable and nonbistable configurations for five different tail morphologies are compared. Bistability is generally found to increase the system efficiency, particularly at lower frequencies where increases are observed up to 250%. The untethered swimming speed of the robot in open water is also found to increase by approximately 30%. The results show that bistability can offer direct performance benefits for biomimetic swimming, but that the bistable transmission must be well tuned to the dynamics of the rest of the system.
This study asks whether bistability is a fundamentally useful feature of swimming mechanisms, or simply a tool to overcome actuation limitations. It quantifies the effects of introducing bistability into a simple bioinspired propulsion system with variable morphology. The results show efficiency gains up to 250% and speed increases of 30%, but also a need for mechanical tuning.image (c) 2024 WILEY-VCH GmbH
Soft robotics can be used not only as a means of achieving novel, more lifelike forms of locomotion, but also as a tool to understand complex biomechanics through the use of robotic model animals. Herein, the control of the undulation mechanics of an entirely soft robotic subcarangiform fish is presented, using antagonistic fast-PneuNet actuators and hyperelastic eutectic gallium-indium (eGaIn) embedded in silicone channels for strain sensing. To design a controller, a simple, data-driven lumped parameter approach is developed, which allows accurate but lightweight simulation, tuned using experimental data and a genetic algorithm. The model accurately predicts the robot's behavior over a range of driving frequencies and a range of pressure amplitudes, including the effect of antagonistic co-contraction of the soft actuators. An amplitude controller is prototyped using the model and deployed to the robot to reach the setpoint of a tail-beat amplitude using fully soft and real-time strain sensing.
Animals use diverse solutions to land on vertical surfaces. Here we show the unique landing of the gliding gecko, Hemidactylus platyurus. Our high-speed video footage in the Southeast Asian rainforest capturing the first recorded, subcritical, short-range glides revealed that geckos did not markedly decrease velocity prior to impact. Unlike specialized gliders, geckos crashed head-first with the tree trunk at 6.0 +/- 0.9 m/s (similar to 140 body lengths per second) followed by an enormous pitchback of their head and torso 103 +/- 34 degrees away from the tree trunk anchored by only their hind limbs and tail. A dynamic mathematical model pointed to the utility of tails for the fall arresting response (FAR) upon landing. We tested predictions by measuring foot forces during landing of a soft, robotic physical model with an active tail reflex triggered by forefoot contact. As in wild animals, greater landing success was found for tailed robots. Experiments showed that longer tails with an active tail reflex resulted in the lower adhesive foot forces necessary for stabilizing successful landings, with a tail shortened to 25% requiring over twice the adhesive foot force.
Water sampling with autonomous aerial vehicles has major applications in water monitoring and chemical accident response. Currently, no robot exists that is capable of both underwater locomotion and flight. This is principally because of the major design tradeoffs for operation in both water and air. A major challenge for such an aerial-aquatic mission is the transition to flight from the water. The use of high power density jet propulsion would allow short, impulsive take-offs by Micro Air Vehicles (MAVs). In this paper, we present a high power water jet propulsion system capable of launching a 70 gram vehicle to speeds of 11 m/s in 0.3s, designed to allow waterborne take off for an Aquatic Micro Air Vehicle (AquaMAV). Jumps propelled by the jet are predicted to have a range of over 20m without gliding. Propulsion is driven by a miniaturised 57 bar gas release system, with many other applications in pneumatically actuated robots. We will show the development of a theoretical model to allow designs to be tailored to specific missions, and free flying operation of the jet.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Efficient Water-Air Propulsion with a Single Propeller, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 155-166 Springer International Publishing
In the previous chapters, aquatic launch and dives into water with small flying robots have been demonstrated. An AquaMAV prototype was presented which was capable of self propelled-flight in air and able to escape water, but this robot had no means of propelling itself beneath the surface. To add aquatic locomotion it is attractive to use the same propulsion system as is used for flight, as this reduces the weight and complexity of the system. However, the increase in load on the propeller in a denser fluid results in much slower rotation speeds, and means a significant loss of motor efficiency.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Why Swim and Fly?, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 13-18 Springer International Publishing
We live on a water-covered planet that is facing rapid change, both globally and locally, due to a combination of human behaviour and natural phenomena [31]. Understanding these changes requires in-depth scientific understanding of our environment. Key to enabling this is the fast, accurate and repeated provision of extensive physical data. However, obtaining dependable geospatial data is itself frequently a challenge, requiring new sensing approaches or considerable adjustments to existing methods.
Arboreal animals face numerous challenges when negotiating complex three-dimensional terrain. Directed aerial descent or gliding flight allows for rapid traversal of arboreal environments, but presents control challenges. Some animals, such as birds or gliding squirrels, have specialized structures to modulate aerodynamic forces while airborne. However, many arboreal animals do not possess these specializations but still control posture and orientation in mid-air. One of the largest inertial segments in lizards is their tail. Inertial reorientation can be used to attain postures appropriate for controlled aerial descent. Here, we discuss the role of tail inertia in a range of mid-air reorientation behaviors using experimental data from geckos in combination with mathematical and robotic models. Geckos can self-right in mid-air by tail rotation alone. Equilibrium glide behavior of geckos in a vertical wind tunnel show that they can steer toward a visual stimulus by using rapid, circular tail rotations to control pitch and yaw. Multiple coordinated tail responses appear to be required for the most effective terminal velocity gliding. A mathematical model allows us to explore the relationship between morphology and the capacity for inertial reorientation by conducting sensitivity analyses, and testing control approaches. Robotic models further define the limits of performance and generate new control hypotheses. Such comparative analysis allows predictions about the diversity of performance across lizard morphologies, relative limb proportions, and provides insights into the evolution of aerial behaviors.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Aquatic Escape: Repeatable Escape with Combustion, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 131-153 Springer International Publishing
Several systems have been developed with aerial-aquatic locomotion capabilities but without demonstrating consecutive transitions to flight from water. Moreover, while some multirotor vehicles possess the ability to operate in both air and water [108, 109], the transition to flight is typically constrained to very calm sea conditions. Fixed-wing robots able to transition dynamically between water and air through high-power thrust bursts represent a low-cost, versatile and more reliable solution. Compared to multirotor vehicles, this approach that would simultaneously result in an increased flight range and allow for aquatic escape in a wider variety of conditions.
Mirko Kovac, Robert James Douglas Siddall (2016)Learning from nature how to land aerial robots, In: Science (American Association for the Advancement of Science)352(6288)pp. 895-896 Amer Assoc Advancement Science
Despite significant research progress on small-scale aerial-aquatic robots, most existing prototypes are still constrained by short operation times and limited performance in different fluids. The main challenge is to design a vehicle that satisfies the partially conflicting design requirements for aerial and aquatic operations. In this letter we present a new class of aerial-aquatic robot, the sailing micro air vehicle, "SailMAV." Thanks to a three-part folding wing design, the SailMAV is capable of both flying and sailing. The robot design permits long and targeted missions at the water interface by leveraging the wind as movement vector. It simultaneously offers the flexibility of flight for rapidly reaching a designated area, overcoming obstacles, and moving from one body of water to another, which can be very useful for water sampling in areas with many obstacles. With a total wingspan of 0.96 m, the SailMAV employs the same wing and actuation surfaces for sailing as for flying. It is capable of water surface locomotion as well as takeoff and flight at a cruising speed of 10.8 m.s(-1). The main contributions of this letter are new solutions to the challenges of combined aerial and aquatic locomotions, the design of a novel hybrid concept, the development of the required control laws, and the demonstration of the vehicle successfully sailing and taking off from the water. This letter can inform the design of hybrid vehicles that adapt their morphology to move effectively.
R. Zufferey, A. Ortega Ancel, A. Farinha, R. Siddall, S. F. Armanini, M. Nasr, R. Brahmal, G. Kennedy, M. Kovac (2019)Consecutive aquatic jump-gliding with water-reactive fuel, In: Science robotics4(34) Amer Assoc Advancement Science
Robotic vehicles that are capable of autonomously transitioning between various terrains and fluids have received notable attention in the past decade due to their potential to navigate previously unexplored and/or unpredictable environments. Specifically, aerial-aquatic mobility will enable robots to operate in cluttered aquatic environments and carry out a variety of sensing tasks. One of the principal challenges in the development of such vehicles is that the transition from water to flight is a power-intensive process. At a small scale, this is made more difficult by the limitations of electromechanical actuation and the unfavorable scaling of the physics involved. This paper investigates the use of solid reactants as a combustion gas source for consecutive aquatic jump-gliding sequences. We present an untethered robot that is capable of multiple launches from the water surface and of transitioning from jetting to a glide. The power required for aquatic jump-gliding is obtained by reacting calcium carbide powder with the available environmental water to produce combustible acetylene gas, allowing the robot to rapidly reach flight speed from water. The 160-gram robot could achieve a flight distance of 26 meters using 0.2 gram of calcium carbide. Here, the combustion process, jetting phase, and glide were modeled numerically and compared with experimental results. Combustion pressure and inertial measurements were collected on board during flight, and the vehicle trajectory and speed were analyzed using external tracking data. The proposed propulsion approach offers a promising solution for future high-power density aerial-aquatic propulsion in robotics.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Sailing and Flying with a Multimodal Robot, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 167-195 Springer International Publishing
The field of aerial-aquatic robotics promises tremendous benefits in data collection as well as unmatched flexibility and remote access. However, the majority of existing aerial-aquatic robots are unable to perform scientific tasks at significant depth, limited by the weight penalty that any pressure resistant container would add. In addition, sealing of an actuated robot is difficult, again adding significant weight to small systems. Wireless communication is a major challenge for underwater robots and certainly poses great constraints to operation at distance. Lastly, underwater propulsion is often highly inefficient due to geometries optimised for flight [109]. Indeed, most aerial-aquatic vehicles either have severely limited water range and operation, stay in very shallow waters or function only in de-ionised water. Too often, the benefit of underwater locomotion is overshadowed by the weight, and complexity increases that are required for reliable operation. This negatively impacts flight performance.
Current Micro Aerial Vehicles (MAVs) are greatly limited by being able to operate in air only. Designing multimodal MAVs that can fly effectively, dive into the water and retake flight would enable applications of distributed water quality monitoring, search and rescue operations and underwater exploration. While some can land on water, no technologies are available that allow them to both dive and fly, due to dramatic design trade-offs that have to be solved for movement in both air and water and due to the absence of high-power propulsion systems that would allow a transition from underwater to air. In nature, several animals have evolved design solutions that enable them to successfully transition between water and air, and move in both media. Examples include flying fish, flying squid, diving birds and diving insects. In this paper, we review the biological literature on these multimodal animals and abstract their underlying design principles in the perspective of building a robotic equivalent, the Aquatic Micro Air Vehicle (AquaMAV). Building on the inspire-abstract-implement bioinspired design paradigm, we identify key adaptations from nature and designs from robotics. Based on this evaluation we propose key design principles for the design of successful aerial-aquatic robots, i.e. using a plunge diving strategy for water entry, folding wings for diving efficiency, water jet propulsion for water takeoff and hydrophobic surfaces for water shedding and dry flight. Further, we demonstrate the feasibility of the water jet propulsion by building a proof-of-concept water jet propulsion mechanism with a mass of 2.6 g that can propel itself up to 4.8 m high, corresponding to 72 times its size. This propulsion mechanism can be used for AquaMAV but also for other robotic applications where high-power density is of use, such as for jumping and swimming robots.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Breaking the Surface, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 3-11 Springer International Publishing
Most animals use different forms of locomotion to move through a varied environment. This allows them to adapt to find food, escape threats or migrate, while minimising their energetic cost of locomotion. To do so, animals must use the same locomotor modules to perform specialised tasks that often have opposed requirements. For example, an animal diving into the water to hunt requires a structure that is as lightweight as possible for efficient flight, whilst still being structurally strong when impacting the water’s surface.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Conclusion, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 229-237 Springer International Publishing
This book introduces the concept of small, unmanned aerial-aquatic robotics. This novel field of research aims to merge the benefits of flight and aquatic operation into one lightweight autonomous platform. As the reader will have seen in this book, wildly different robots can be envisioned as solutions to this formidable challenge.
The ability to collect water samples rapidly with aerial-aquatic robots would increase the safety and efficiency of water health monitoring and allow water sample collection fromdangerous or inaccessible areas. An aquatic micro air vehicle (AquaMAV) able to dive into the water offers a low cost and robust means of collecting samples. However, small-scale flying vehicles generally do not have sufficient power for transition to flight from water. In this paper, we present a novel jet propelled AquaMAV able to perform jumpgliding leaps from water and a planar trajectory model that is able to accurately predict aquatic escape trajectories. Using this model, we are able to offer insights into the stability of aquatic takeoff to perturbations from surface waves and demonstrate that an impulsive leap is a robust method of flight transition. The AquaMAV uses a CO2 powered water jet to escape the water, actuated by a custom shape memory alloy gas release. The 100 g robot leaps from beneath the surface, where it can deploy wings and glide over the water, achieving speeds above 11 m/s.
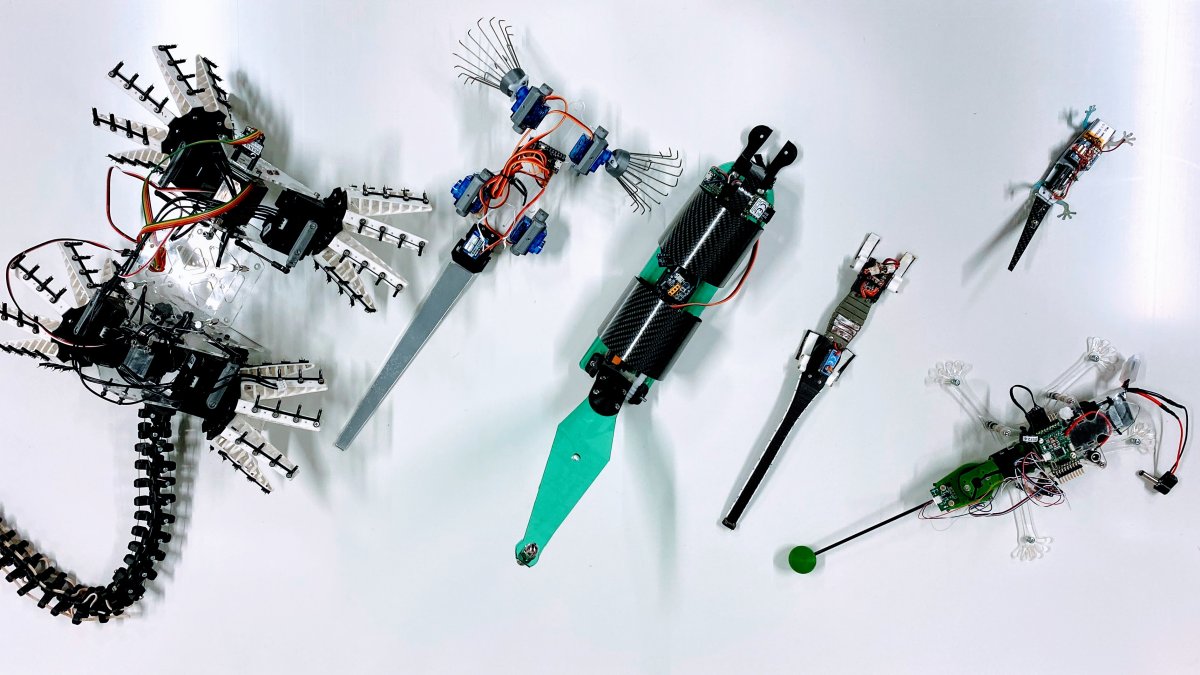
Locomotion in unstructured and irregular environments is an enduring challenge in robotics. This is particularly true at the small scale, where relative obstacle size increases, often to the point that a robot is required to climb and transition both over obstacles and between locomotion modes. In this paper, we explore the efficacy of different design features, using 'morphological intelligence', for mobile robots operating in rugged terrain, focusing on the use of active and passive tails and changes in mass distribution, as well as elastic suspensions of mass. We develop an initial prototype whegged robot with a compliant neck and test its obstacle traversal performance in rapid locomotion with varying its mass distribution. Then we examine a second iteration of the prototype with a flexible tail to explore the effect of the tail and mass distribution in ascending a slope and traversing obstacles. Based on observations from these tests, we develop a new platform with increased performance and a fin ray wheel-leg design and present experiments on traversing large obstacles, which are larger than the robot's body, of this platform with tails of varying compliance. This biorobotic platform can assist with generating and testing hypotheses in robotics-inspired biomechanics of animal locomotion.
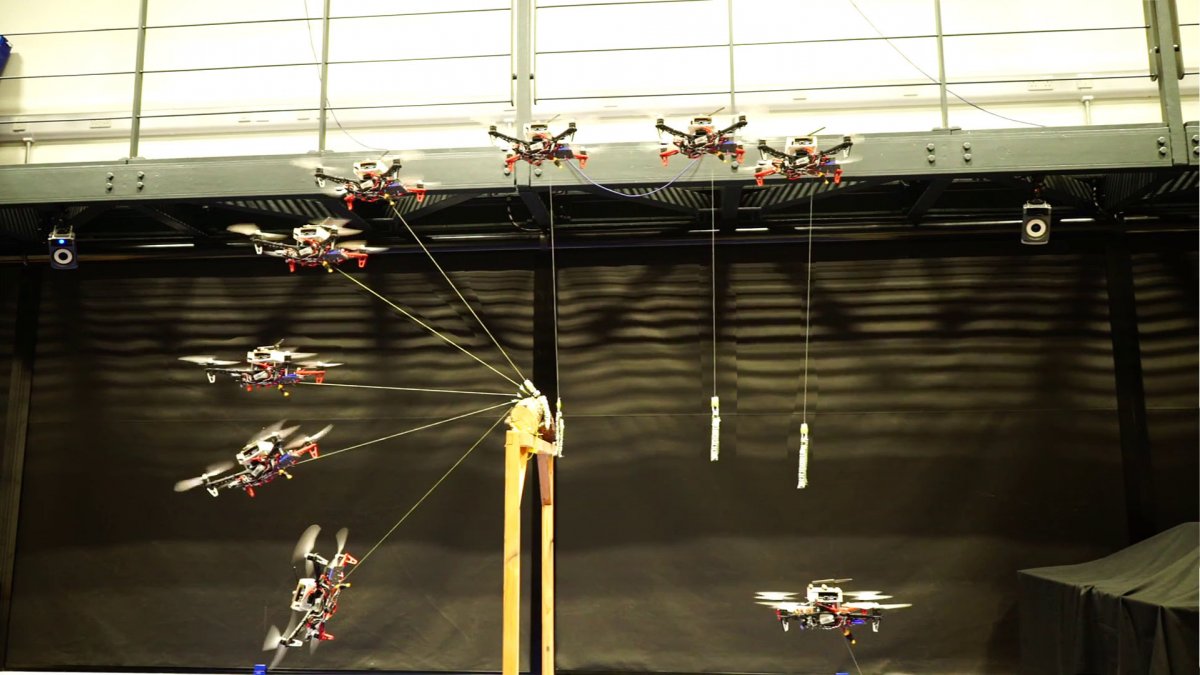
Whilst Micro Aerial Vehicles (MAVs) possess a variety of promising capabilities, their high energy consumption severely limits applications where flight endurance is of high importance. Reducing energy usage is one of the main challenges in advancing aerial robot utility. To address this bottleneck in the development of unmanned aerial vehicle applications, this work proposes an bioinspired mechanical approach and develops an aerial robotic system for greater endurance enabled by low power station-keeping. The aerial robotic system consists of an multirotor MAV and anchoring modules capable of launching multiple tensile anchors to fixed structures in its operating envelope. The resulting tensile perch is capable of providing a mechanically stabilized mode for high accuracy operation in 3D workspace. We explore generalised geometric and static modelling of the stabilisation concept using screw theory. Following the analytical modelling of the integrated robotic system, the tensile anchoring modules employing high pressure gas actuation are designed, prototyped and then integrated to a quadrotor platform. The presented design is validated with experimental tests, demonstrating the stabilization capability even in a windy environment.
The application of soft architectures in robotics offers the potential to reduce control complexity while increasing versatility, performance and robustness of robot operation. However, current aerial robots tend to have rigid body structures, and rely predominantly on abundant sensing and dynamic closed loop control to fly. In contrast, flying animals combine sensing and control with adaptive body designs, exploiting fluid dynamic and biomechanical effects to achieve very high levels of operational robustness and multiple functionalities. This paper provides an overview of several examples in which softness is used in aerial robotics, outlining instances where inspiration from biology can be taken to develop next generation aerial robots which selectively use soft materials and adaptive morphologies to achieve high-performance flight behaviours. For illustration we describe three case studies where soft structures have been used in aerial robots: (1) to enable multi-modal mobility across terrain interfaces and fluid boundaries, (2) for robust perching in complex environments and (3) to repair and manufacture infrastructure components. These examples show the benefits that can be gained through the application of soft technologies and they outline how the bio-inspired approaches can be used to develop the next generation of flying robots.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Multirotor Aircraft and the Aquatic Environment, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 197-211 Springer International Publishing
The previous chapters presented hybrid robot concepts and prototypes relying on the use of fixed wings for lift generation. The higher flight efficiency of such devices makes them suitable for covering large distances and can even serve to extend their locomotion envelope (see Chap. 11).
The addition of external mass onto an organism can be used to examine the salient features of inherent locomotion dynamics. In this biorobotics study general principles of systems in motion are explored experimentally to gain insight on observed biodiversity in body plans and prevalent cranio-caudal mass distributions. Head and tail mass can make up approximately 20% of total body mass in lizards. To focus on the effect of differential loading of the ‘head’ and the ‘tail’ we designed an experiment using weights of 10% total body mass connected to the front and rear at varying distances to simulate biological mass distribution. Additive manufacturing techniques with compliant materials were utilized to make the biomimetic limbs. Obstacle traversal performance was evaluated over 126 trials in a variety of Moment of Inertia (MOI) configurations, recording pitch angles. Results showed that a forward-biased MOI appears useful for regaining contact in the front wheels during obstacle negotiation, while large passive tails can have a destabilising effect in some configurations. In our robophysical model, we explore both wheeled and legged locomotion (‘whegs’), and additionally examine damping the motion of the chassis by utilizing soft non-pneumatic tires (‘tweels’) which reduce body oscillations that arise from locomotion on irregular terrain.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Aerial-Aquatic Locomotion in Nature, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 19-31 Springer International Publishing
Water covers 363 million square km, or 72% of the earth’s surface. The vast majority of this water is saline (96%), frozen (2%) or groundwater (1%). The 105\documentclass[12pt]{minimal}
\usepackage{amsmath}
\usepackage{wasysym}
\usepackage{amsfonts}
\usepackage{amssymb}
\usepackage{amsbsy}
\usepackage{mathrsfs}
\usepackage{upgreek}
\setlength{\oddsidemargin}{-69pt}
\begin{document}$$^5$$\end{document} km3\documentclass[12pt]{minimal}
\usepackage{amsmath}
\usepackage{wasysym}
\usepackage{amsfonts}
\usepackage{amssymb}
\usepackage{amsbsy}
\usepackage{mathrsfs}
\usepackage{upgreek}
\setlength{\oddsidemargin}{-69pt}
\begin{document}$$^3$$\end{document} of surface freshwater (0.008%) is in turn concentrated almost entirely in three large great lake systems (Fig. 3.1), with a vanishing small amount of surface freshwater forming lakes and rivers.
The application of flying systems to practical tasks is consistently limited by the poor endurance of hovering robots. The ability to perch to fixed surfaces allows a robot to gather data and inspect structures in a low power state, while retaining the access and manoeuvrability that flight offers. In this paper we present a passively adaptive perching mechanism which allows an aerial vehicle to stably attach to a variety of surfaces including tree branches and pipelines. This is enabled by a compliant grapple module, which passively conforms to the surface of convex perching targets, ensuring reliable traction and a very high load capacity (tension tested to > 60 kg in some instances) whilst still releasing effortlessly. This is due to the mechanics of the grapple, which is designed to passively tighten and attach to a variety of branch diameters and shapes. The grapple is paired with a hybrid force-motion controller which allows the cable tension to be regulated as the vehicle achieves the desired attitude. The hybrid control approach exploits the mechanical compliance of the system to ensure reliable, stable attachment to irregular natural structures, and the addition of a winch allows the robot to stably orient itself in any position or orientation relative to the branch. This approach demonstrates tensile perching using adaptive anchors. The presented subsystems can be applied to other robots where high force authority is required.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Airframe Design for Plunge Diving, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 77-98 Springer International Publishing
In this chapter the design of a plunge diving AquaMAV is detailed. This enhanced AquaMAV prototype is capable of propelled flight, wing retraction for diving into water and jet propelled aquatic escape. The selection process for key components is detailed, as well as the specific attributes necessary for aerial-aquatic locomotion. The AquaMAV includes some limited automation, to allow the robot to self launch when in water, where radio communication is challenging.
Aerial-aquatic locomotion would allow a broad array of tasks in robot-enabled environmental monitoring or disaster management. One of the most significant challenges of aerial-aquatic locomotion in mobile robots is finding a propulsion system that is capable of working effectively in both fluids and transitioning between them. The large differences in the density and viscosity of air compared to water means that a single direct propulsion system without adaptability will be inefficient in at least one medium. This paper examines multimodal propeller propulsion using computational tools validated against experimental data. Based on this analysis, we present a novel gearbox enabling an aerial propulsion system to operate efficiently underwater. This is achieved with minimal complexity using a single fixed pitch propeller system, which can change gear underwater by reversing the drivemotor, but with the gearing arranged to leave the propeller direction unchanged. This system is then integrated into a small robot, and flights in air and locomotion underwater are demonstrated.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Practical Tips for Building Aerial-Aquatic Robots, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 213-228 Springer International Publishing
This book would not be complete without a chapter on practical hardware and software elements used throughout the presented robots. We hope that this can serve as a rough toolbox for aerial-aquatic vehicle development, and cover some of the prototyping choices that are often under-reported in academic literature, but consume outsize research time.
Abstract Recent observations of wingless animals, including jumping nematodes, springtails, insects, and wingless vertebrates like geckos, snakes, and salamanders, have shown that their adaptations and body morphing are essential for rapid self-righting and controlled landing. These skills can reduce the risk of physical damage during collision, minimize recoil during landing, and allow for a quick escape response to minimize predation risk. The size, mass distribution, and speed of an animal determine its self-righting method, with larger animals depending on the conservation of angular momentum and smaller animals primarily using aerodynamic forces. Many animals falling through the air, from nematodes to salamanders, adopt a skydiving posture while descending. Similarly, plant seeds such as dandelions and samaras are able to turn upright in mid-air using aerodynamic forces and produce high decelerations. These aerial capabilities allow for a wide dispersal range, low-impact collisions, and effective landing and settling. Recently, small robots that can right themselves for controlled landings have been designed based on principles of aerial maneuvering in animals. Further research into the effects of unsteady flows on self-righting and landing in small arthropods, particularly those exhibiting explosive catapulting, could reveal how morphological features, flow dynamics, and physical mechanisms contribute to effective mid-air control. More broadly, studying apterygote (wingless insects) landing could also provide insight into the origin of insect flight. These research efforts have the potential to lead to the bio-inspired design of aerial micro-vehicles, sports projectiles, parachutes, and impulsive robots that can land upright in unsteady flow conditions.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)The Physics of Aerial Aquatic Locomotion, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 43-53 Springer International Publishing
This chapter presents an overview of some fundamental physical laws and concepts at play in generic, as clarified in Figs. 5.1 and 5.2. The vehicle-specific physics are then introduced in the following chapters and form the basis for locomotion derived for the different vehicles presented.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Diving from Flight, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 99-129 Springer International Publishing
Having measured the longitudinal aerodynamics of the AquaMAV in wind tunnel tests (cf. Chap. 7), the data gathered can then be used to analyse the dive performance of the vehicle, as well as estimate and evaluate its dynamic properties. As in Sect. 6.4, we begin by considering a quasi-steady state model, where, furthermore, the aerial and aquatic phases are considered separately and transition phases are omitted. This model is used to obtain planar dive trajectories for both the purely aerial and the purely aquatic phase, providing a clear overview of the achievable performance of the robot. In the second part of the chapter, a more detailed model of the vehicle is developed that accounts for some dynamic effects and explicitly includes the air-to-water transition. The latter model is used to obtain more insight into the vehicle dynamics and into the impact phase. It also serves as a basis for simulations covering several envisaged mission stages.
Aerial robots capable of locomotion in both air and water would enable novel mission profiles in complex environments, such as water sampling after floods or underwater structural inspections. The design of such a vehicle is challenging because it implies significant propulsive and structural design trade-offs for operation in both fluids. In this paper, we present a unique Aquatic Micro Air Vehicle (AquaMAV), which uses a reconfigurable wing to dive into the water from flight, inspired by the plunge diving strategy of water diving birds in the family
Sulidae
. The vehicle's performance is investigated in wind and water tunnel experiments, from which we develop a planar trajectory model. This model is used to predict the dive behaviour of the AquaMAV, and investigate the efficacy of passive dives initiated by wing folding as a means of water entry. The paper also includes first field tests of the AquaMAV prototype where the folding wings are used to initiate a plunge dive.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Synthetic Aerial Aquatic Locomotion, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 33-41 Springer International Publishing
A wealth of research exists into the broader question of how robotic mobility can be expanded beyond a single domain/terrain. A significant amount of recent research attention has been given to the implementation of aerial-terrestrial mobility into miniature robots [94], resulting in mobile robots with shared subsystems and additional mechanisms which are analogous to the AquaMAV robot presented in Chap. 7.
Arboreal mammals navigate a highly three dimensional and discontinuous habitat. Among arboreal mammals, squirrels demonstrate impressive agility. In a recent "viral" YouTube video, unsuspecting squirrels were mechanically catapulted off of a track, inducing an initially uncontrolled rotation of the body. Interestingly, they skillfully stabilized themselves using tail motion, which ultimately allowed the squirrels to land successfully. Here we analyze the mechanism by which the squirrels recover from large body angular rates. We analyzed from the video that squirrels first use their tail to help stabilizing their head to visually fix a landing site. Then the tail starts to rotate to help stabilizing the body, preparing themselves for landing. To analyze further the mechanism of this tail use during mid-air, we built a multibody squirrel model and showed the righting strategy based on body inertia moment changes and active angular momentum transfer between axes. To validate the hypothesized strategy, we made a squirrel-like robot and demonstrated a fallstabilizing experiment. Our results demonstrate that a squirrel's long tail, despite comprising just 3% of body mass, can inertially stabilize a rapidly rotating body. This research contributes to better understanding the importance of long tails for righting mechanisms in animals living in complex environments such as trees.
Raphael Zufferey, Robert Siddall, Sophie F. Armanini, Mirko Kovac, Robert James Douglas Siddall (2022)Aquatic Escape: Fast Escape with a Jet Thruster, In: Between Sea and Sky: Aerial Aquatic Locomotion in Miniature Robotspp. 57-76 Springer International Publishing
In a previous chapter an idealised water jet thruster was analysed, and it was argued that the most effective system would use large pressures to drive a small volume of water. In this chapter a more detailed physical model of water jet propulsion will be introduced, and the key design features of a jet thruster prototype detailed. Consistent static thrust from the fabricated device is then demonstrated.
Sandrine Zufferey, Robert James Douglas Siddall (2019)Preface, In: Implicaturespp. xi-xii
2021 Communications Biology, ’Tails stabilize landing of gliding geckos crashing head-first into tree trunks’, Robert Siddall, Gregory Byrnes, Robert J Full and Ardian Jusufi (link)
2021 Integrative and Comparative Biology, ’The Role of the Tail in Self Righting During Arboreal Falls in Squirrels: From Behavior to Robotics’, Toshihiko Fukushima, Robert Siddall, Fabian Schwab Séverine Toussaint, Gregory Byrnes, John A. Nyakatura and Ardian Jusufi (link)
2021 Integrative and Comparative Biology, ’Mechanisms for mid-air reorientation using tail rotation in gliding geckos’, Robert Siddall, Gregory Byrnes, Robert J Full and Ardian Jusufi (link)
2021 Advanced Robotics, 'Compliance, mass distribution and contact forces in cursorial and scansorial locomotion with biorobotic physical models' R Siddall, T Fukushima, D Bardhi, B Perteshoni, A Morina, E Hasimja, et al. (link)
2021 Advanced Intelligent Systems 'Modeling and Control of a Soft Robotic Fish with Integrated Soft Sensing' YH Lin, R Siddall, F Schwab, T Fukushima, H Banerjee, Y Baek, D Vogt, et al. (link)
2019 Science Robotics, 'Consecutive aquatic jump-gliding with water-reactive fuel', R Zufferey, A Ortega Ancel, A Farinha, R Siddall, SF Armanini, M Nasr, RV Brahmal, G Kennedy, M Kovac (link)
2019 Robotics and Automation Letters, 'SailMAV: Design and Implementation of a Novel Multi-Modal Flying Sailing Robot', Raphael Zufferey, Alejandro Ortega Ancel, Celia Raposo, Sophie Franziska Armanini, Andre Farinha, Robert Siddall, Ion Berasaluce, Haijun Zhu, Mirko Kovac (link)
2017 Royal Society Interface Focus, 'Wind and water tunnel testing of a morphing aquatic micro air vehicle', Robert Siddall, Alejandro Ortega Ancel and Mirko Kovac (link)
2017 Robotics and Automation Letters, 'Efficient Aerial-Aquatic Locomotion with a Single Propulsion System', Yu Herng Tan, Robert Siddall and Mirko Kovac (link)
2016 ASME/IEEE Transactions on Mechatronics, 'Fast Aquatic Escape with a Jet Thruster', Robert Siddall and Mirko Kovac (link)
2014 Bioinspiration & Biomimetics, 'Launching the AquaMAV: Bioinspired Design For Aerial Aquatic Robotic Platforms', Robert Siddall and Mirko Kovac (link)
Conferences
2020 Society for Comparative and Integrative Biology Annual Meeting, 'Modulation of Cranio-Caudal mass distribution facilitates obstacle traversal in a cursorial biorobotic model', Robert Siddall and Ardian Jusufi
2019 International Conference on Soft Robotics (RoboSoft), 'A Passively Adaptive Microspine Grapple for Robust, Controllable Perching', Hai-Nguyen Nguyen, Robert Siddall, Brett Stephens, Alberto Navarro-Rubio and Mirko Kovac (link)
2019 Living Machines, 'Heads or Tails? Cranio-Caudal Mass Distribution for Robust Locomotion with Biorobotic Appendages Composed of 3D-Printed Soft Materials', Robert Siddall, Fabian Schwab, Jenny Michel, James Weaver and Ardian Jusufi (link)
2019 AIAA Aviation 2019 Forum, 'Modelling and simulation of a bioinspired aquatic micro aerial vehicle', Sophie F Armanini, Robert Siddall and Mirko Kovac (link)
2017 International Conference on Intelligent Robots and Systems (IROS), 'Spidermav: Perching and stabilizing micro aerial vehicles with bio-inspired tensile anchoring systems', Ketao Zhang, Pisak Chermprayong, Talib Al-Hinai, Robert Siddall and Mirko Kovac (link)
2016 Soft Robotics: Trends, Applications and Challenges, 'Bio-inspired Soft Aerial Robots: Adaptive Morphology for High-Performance Flight', Sina Sareh, Robert Siddall, Talib Al-Hinai and Mirko Kovac (link)
2015 International Symposium on Robotics Research, 'Explosive Propulsion Strategies for Aquatic Take-off in Robotics', Robert Siddall, Grant Kennedy and Mirko Kovac (link)
2015 International Conference on Robotics and Automation (ICRA), 'A Water Jet Thruster for an Aquatic Micro Air Vehicle', Robert Siddall and Mirko Kovac (link)
2015 International Symposium on Adaptive Motion of Animals and Machines, 'Bioinspired Aerial-Aquatic Mobility for Miniature Robots', Robert Siddall and Mirko Kovac
2012 Suspension Processing & Suspension Engineering Rheology 'Velocity of sliding flow of a dense granular suspension down an inclined plane’, Digby Symons and Robert Siddall
Patents
2019 GB1717137.2 and PCT:408549GB/DJW/ELH, 'Device for Remote Monitoring and Activity', HayBeeSee Ltd.
2016 GB1701052.1, 'An electronic fluency device', Jordi Fernandez Oromi, Rowan Brackston, Van Dimitri Immerseel, Juan Marcos Garcia de la Cruz, Robert Siddall and James Bird
Thesis
Aerial-Aquatic Locomotion with Miniature Robots, Doctoral Thesis Imperial College London (link)
Sliding Wet Granular Flow, Master's Thesis, University of Cambridge